Different robotic simulators are used to test the performance of dynamic and control algorithms. After that, the algorithms are tested on the robot. In all of these steps, we use Robotic Operating System (ROS). Check out this paper for more information about the Surena IV robot's hardware and software structure.

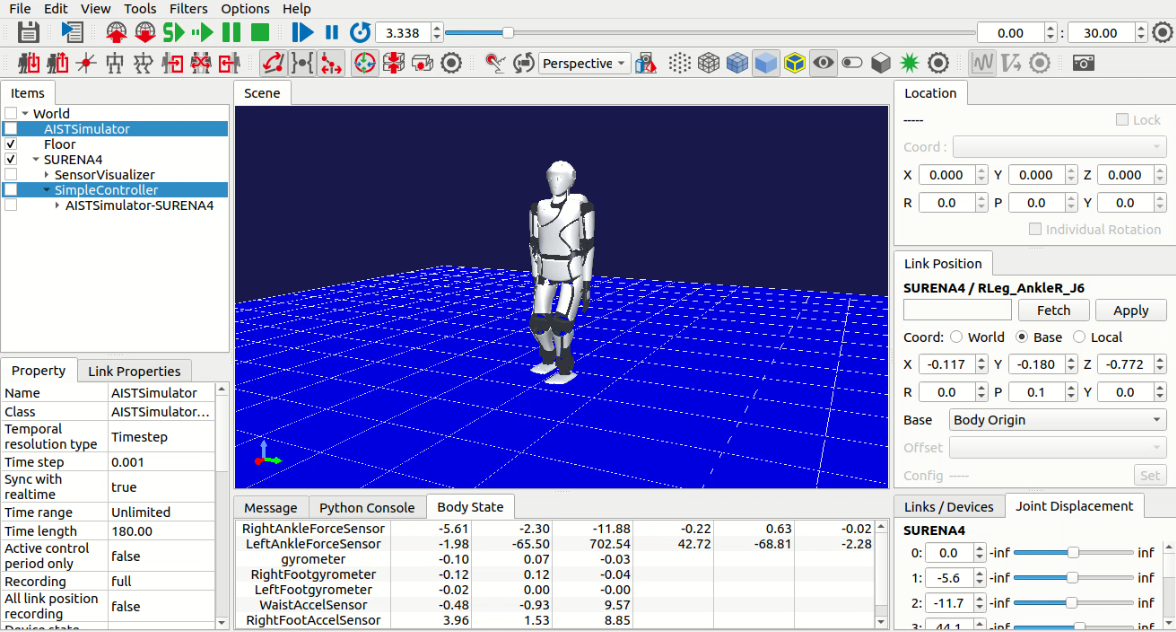
Our main simulator is Choreonoid, which provides realistic and reliable results in different conditions.
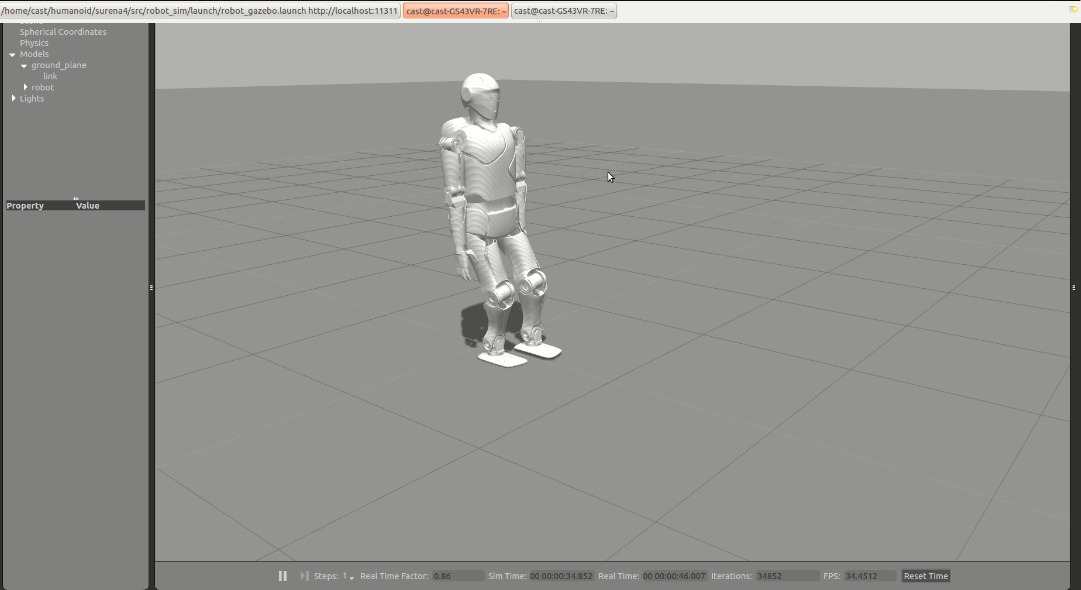
Because Gazebo is well integerated with the ROS environment, it is used in many of our simulations.
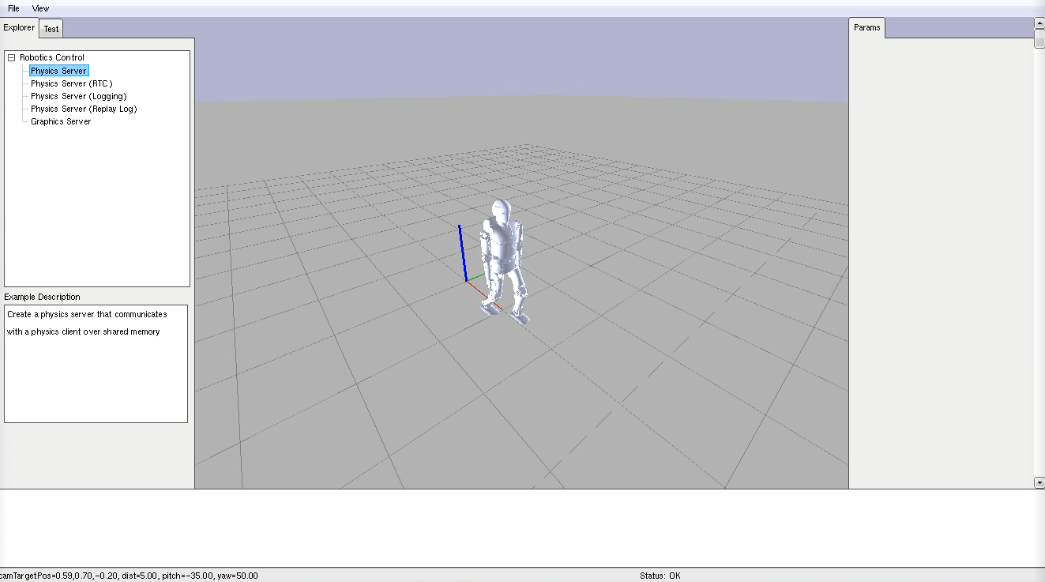
In cases where it is necessary to test algorithms quickly, Pybullet is the most suitable option due to its simplicity.
Various parts of the robot's code can be accessed through github as open source. Your contribution is highly appreciated.
