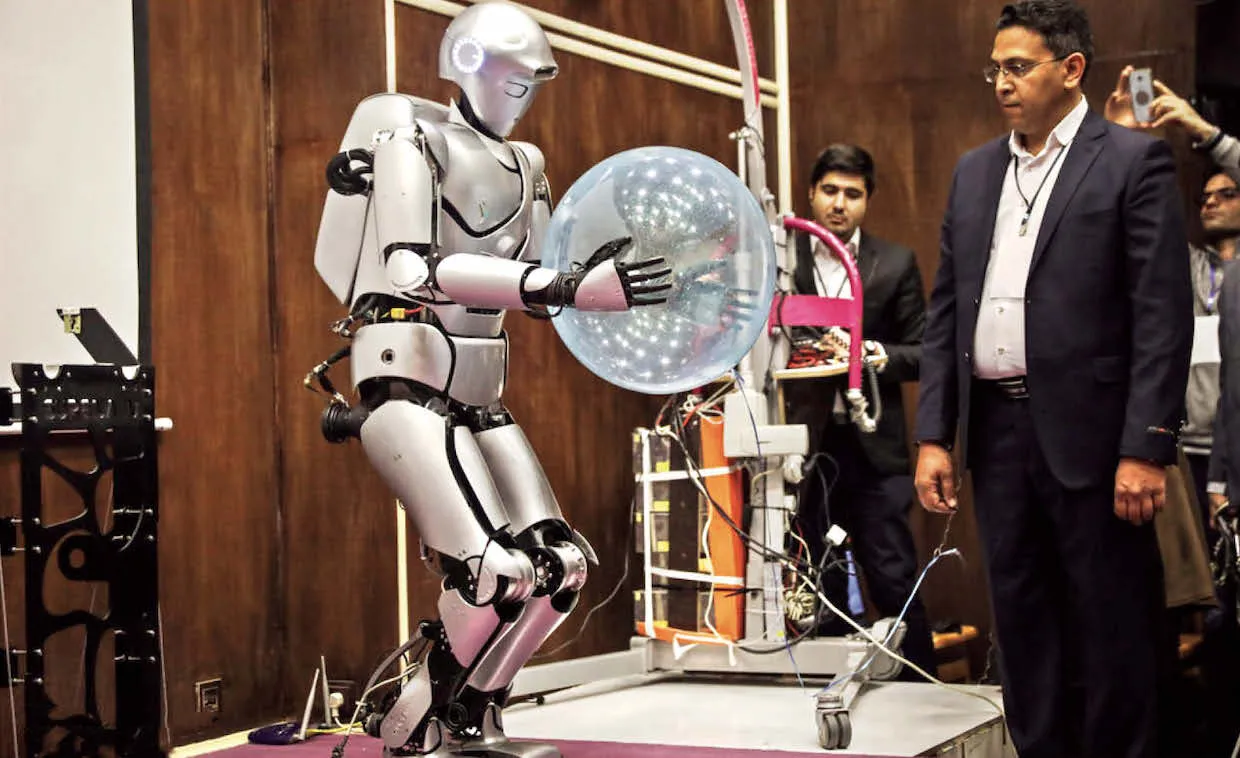
Humanoid robots are designed to look like humans for intuitive collaboration, and the latest locomotion and AI technology is helping to speed up their development.